Welcome to sukbear's Blog!
Talk is cheap, Show me the code-
You Make My Heart Smile
- You kindled my heart.
- Lost in your eyes.
- Watching music fountain.
- handsome & beautiful
- That reminds me too much od you.
- Look at my little eyes.
- You are kidding, I am laughing
- Too serious, it should be cute.
- It’s always been you ,I love you!
You kindled my heart.

Lost in your eyes.

Watching music fountain.

handsome & beautiful

That reminds me too much od you.

Look at my little eyes.

You are kidding, I am laughing

Too serious, it should be cute.

It’s always been you ,I love you!
-
swagger
pom.xml
<dependency> <groupId>io.springfox</groupId> <artifactId>springfox-swagger2</artifactId> <version>2.9.2</version> </dependency> <dependency> <groupId>io.springfox</groupId> <artifactId>springfox-swagger-ui</artifactId> <version>2.8.0</version> </dependency>### 配置
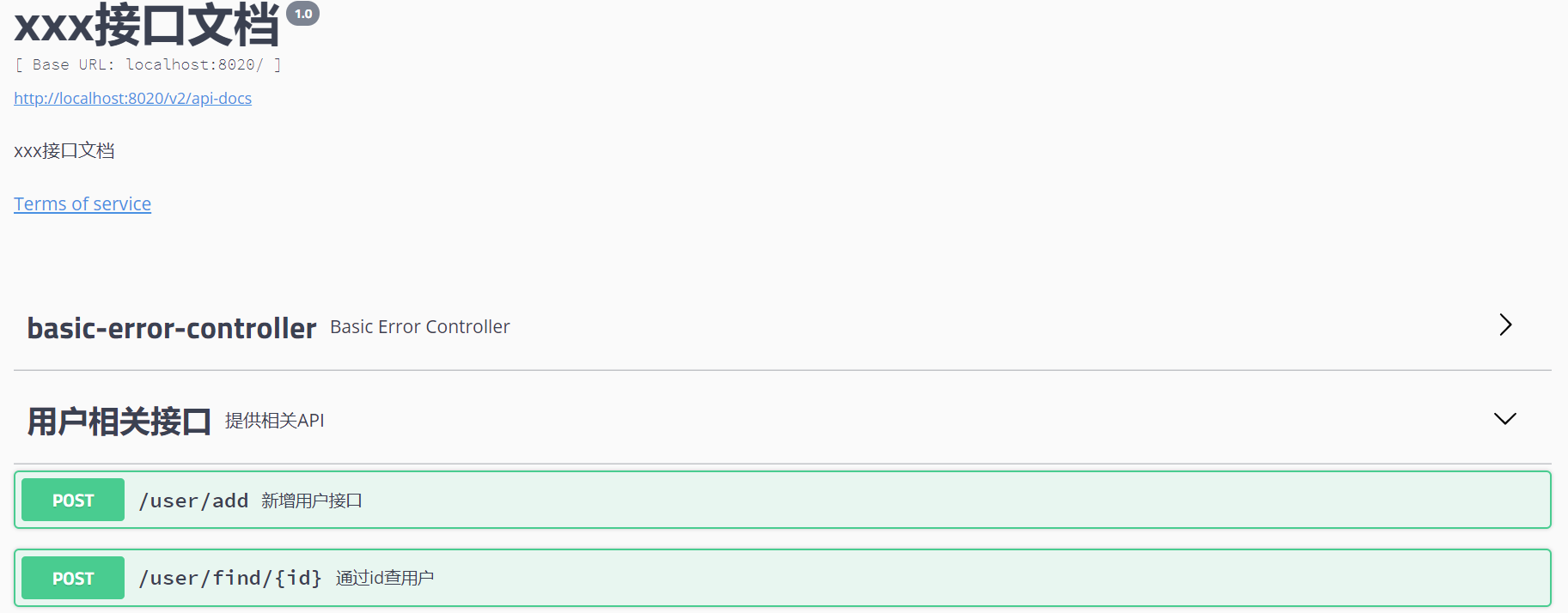
@Configuration @EnableSwagger2 public class SwaggerConfig { @Bean public Docket createRestApi() { return new Docket(DocumentationType.SWAGGER_2) .apiInfo(apiInfo()) .select() .apis(RequestHandlerSelectors.any()) .paths(PathSelectors.any()) .build(); }private ApiInfo apiInfo() { return new ApiInfoBuilder().title("xxx接口文档") .description("xxx接口文档") .termsOfServiceUrl("localhost") .version("1.0") .build(); } }### 实体
@Data @ApiModel public class User { @ApiModelProperty("用户id") private int id; @ApiModelProperty("用户姓名") private String name; @ApiModelProperty("用户地址") private String address; }### controller
@RestController @RequestMapping("/user") @Api(tags = "用户相关接口",description = "提供相关API") public class UserController { @ApiOperation("新增用户接口") @PostMapping("/add") public boolean adduser(@RequestBody User user){ return false; } @ApiOperation("通过id查用户") @PostMapping("/find/{id}") public User findById(@PathVariable("id") int id){ return new User(); } }### 启动项目 ·访问http://localhost:8020/swagger-ui.html#/
注解
@Api: 描述 Controller @ApiIgnore: 忽略该 Controller,指不对当前类做扫描 @ApiOperation: 描述 Controller类中的 method接口 @ApiParam: 单个参数描述,与 @ApiImplicitParam不同的是,他是写在参数左侧的。如( @ApiParam(name="username",value="用户名")Stringusername) @ApiModel: 描述 POJO对象 @ApiProperty: 描述 POJO对象中的属性值 @ApiImplicitParam: 描述单个入参信息 @ApiImplicitParams: 描述多个入参信息 @ApiResponse: 描述单个出参信息 @ApiResponses: 描述多个出参信息 @ApiError: 接口错误所返回的信息
-
分布式系统的经典基础理论
CAP
CAP定理
在理论计算机科学中,CAP定理(CAP theorem),又被称作布鲁尔定理(Brewer’s theorem),它指出对于一个分布式计算系统来说,不可能同时满足以下三点:
- 一致性(Consistence) :所有节点访问同一份最新的数据副本
- 可用性(Availability):每次请求都能获取到非错的响应——但是不保证获取的数据为最新数据
- 分区容错性(Partition tolerance) : 分布式系统在遇到某节点或网络分区故障的时候,仍然能够对外提供满足一致性和可用性的服务。
CAP仅适用于原子读写的NOSQL场景中,并不适合数据库系统。现在的分布式系统具有更多特性比如扩展性、可用性等等,在进行系统设计和开发时,我们不应该仅仅局限在CAP问题上。
BASE理论
BASE理论三要素
- 基本可用(Basically Available)
- 软状态(Soft-state)
- 最终一致性(Eventually Consistent)
- 基本可用 基本可用是指分布式系统在出现不可预知故障的时候,允许损失部分可用性。但是,这绝不等价于系统不可用。 比如: 响应时间上的损失:正常情况下,一个在线搜索引擎需要在0.5秒之内返回给用户相应的查询结果,但由于出现故障,查询结果的响应时间增加了1~2秒 系统功能上的损失:正常情况下,在一个电子商务网站上进行购物的时候,消费者几乎能够顺利完成每一笔订单,但是在一些节日大促购物高峰的时候,由于消费者的购物行为激增,为了保护购物系统的稳定性,部分消费者可能会被引导到一个降级页面
-
软状态 软状态指允许系统中的数据存在中间状态,并认为该中间状态的存在不会影响系统的整体可用性,即允许系统在不同节点的数据副本之间进行数据同步的过程存在延时
- 最终一致性 最终一致性强调的是系统中所有的数据副本,在经过一段时间的同步后,最终能够达到一个一致的状态。因此,最终一致性的本质是需要系统保证最终数据能够达到一致,而不需要实时保证系统数据的强一致性。
参考
-
awesome-Zookeeper
Zookeeper
zookeeper是什么?
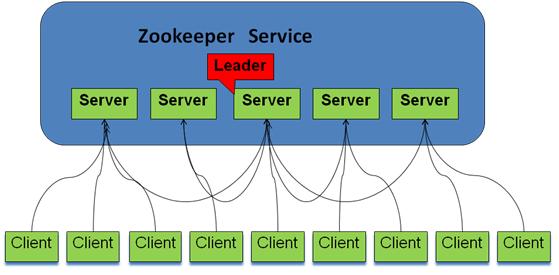
- zookeeper是一个开源的分布式数据一致性的解决方案,分布式应用程序可以基于zookeeper实现数据发布订阅,负载均衡,命名服务,分布式协调,集群管理,分布式锁和分布式队列等一系列功能。
系统模型
角色类型

设计目的
1.最终一致性:client不论连接到哪个Server,展示给它都是同一个视图,这是zookeeper最重要的性能。 2 .可靠性:具有简单、健壮、良好的性能,如果消息m被到一台服务器接受,那么它将被所有的服务器接受。 3 .实时性:Zookeeper保证客户端将在一个时间间隔范围内获得服务器的更新信息,或者服务器失效的信息。但由于网络延时等原因,Zookeeper不能保证两个客户端能同时得到刚更新的数据,如果需要最新数据,应该在读数据之前调用sync()接口。 4 .等待无关(wait-free):慢的或者失效的client不得干预快速的client的请求,使得每个client都能有效的等待。 5.原子性:更新只能成功或者失败,没有中间状态。 6 .顺序性:包括全局有序和偏序两种:全局有序是指如果在一台服务器上消息a在消息b前发布,则在所有Server上消息a都将在消息b前被发布;偏序是指如果一个消息b在消息a后被同一个发送者发布,a必将排在b前面。工作原理
· Zookeeper的核心是原子广播,这个机制保证了各个Server之间的同步。实现这个机制的协议叫做Zab协议。Zab协议有两种模式,它们分别是恢复模式(选主)和广播模式(同步)。当服务启动或者在领导者崩溃后,Zab就进入了恢复模式,当领导者被选举出来,且大多数Server完成了和leader的状态同步以后,恢复模式就结束了。状态同步保证了leader和Server具有相同的系统状态。
· 为了保证事务的顺序一致性,zookeeper采用了递增的事务id号(zxid)来标识事务。所有的提议(proposal)都在被提出的时候加上了zxid。实现中zxid是一个64位的数字,它高32位是epoch用来标识leader关系是否改变,每次一个leader被选出来,它都会有一个新的epoch,标识当前属于那个leader的统治时期。低32位用于递增计数。
· 每个Server在工作过程中有三种状态:
LOOKING:当前Server不知道leader是谁,正在搜寻 LEADING:当前Server即为选举出来的leader FOLLOWING:leader已经选举出来,当前Server与之同步选主流程
· 当leader崩溃或者leader失去大多数的follower,这时候zk进入恢复模式,恢复模式需要重新选举出一个新的leader,让所有的Server都恢复到一个正确的状态。
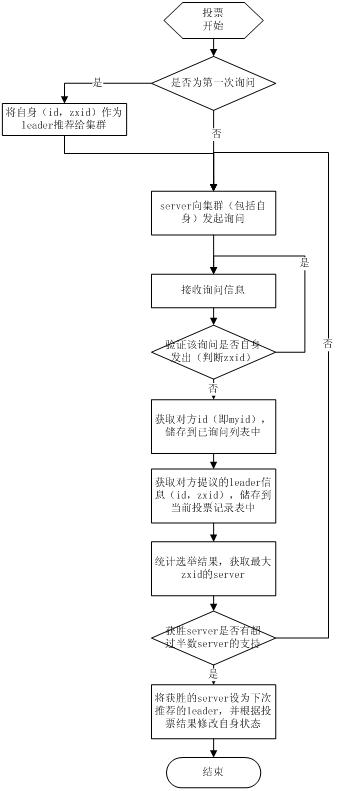
basic paxos
1 .选举线程由当前Server发起选举的线程担任,其主要功能是对投票结果进行统计,并选出推荐的Server; 2 .选举线程首先向所有Server发起一次询问(包括自己); 3 .选举线程收到回复后,验证是否是自己发起的询问(验证zxid是否一致),然后获取对方的id(myid),并存储到当前询问对象列表中,最后获取对方提议的leader相关信息(id,zxid),并将这些信息存储到当次选举的投票记录表中; 4. 收到所有Server回复以后,就计算出zxid最大的那个Server,并将这个Server相关信息设置成下一次要投票的Server; 5. 线程将当前zxid最大的Server设置为当前Server要推荐的Leader,如果此时获胜的Server获得n/2 + 1的Server票数, 设置当前推荐的leader为获胜的Server,将根据获胜的Server相关信息设置自己的状态,否则,继续这个过程,直到leader被选举出来。· 结论: 要使Leader获得多数Server的支持,则Server总数必须是奇数2n+1,且存活的Server的数目不得少于n+1.
fast paxos
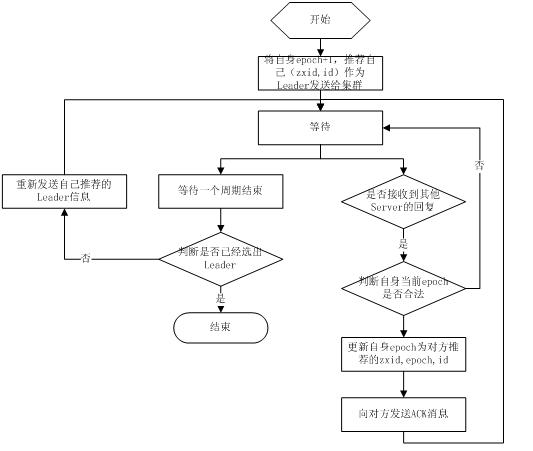
同步流程
· 选完leader以后,zk就进入状态同步过程。
1. leader等待server连接; 2 .Follower连接leader,将最大的zxid发送给leader; 3 .Leader根据follower的zxid确定同步点; 4 .完成同步后通知follower 已经成为uptodate状态; 5 .Follower收到uptodate消息后,又可以重新接受client的请求进行服务了。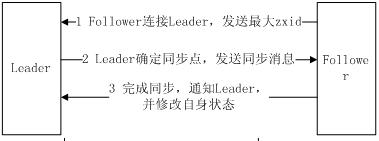
工作流程
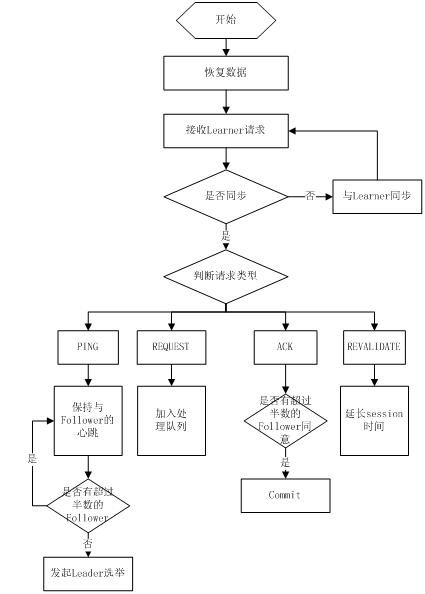
leader工作流程
· Leader主要有三个功能:
1 .恢复数据; 2 .维持与Learner的心跳,接收Learner请求并判断Learner的请求消息类型; 3 .Learner的消息类型主要有PING消息、REQUEST消息、ACK消息、REVALIDATE消息,根据不同的消息类型,进行不同的处理。· PING消息是指Learner的心跳信息;REQUEST消息是Follower发送的提议信息,包括写请求及同步请求;ACK消息是Follower的对提议的回复,超过半数的Follower通过,则commit该提议;REVALIDATE消息是用来延长SESSION有效时间。
Follower工作流程
· Follower主要有四个功能:
1. 向Leader发送请求(PING消息、REQUEST消息、ACK消息、REVALIDATE消息); 2 .接收Leader消息并进行处理; 3 .接收Client的请求,如果为写请求,发送给Leader进行投票; 4 .返回Client结果。 · Follower的消息循环处理如下几种来自Leader的消息: 1 .PING消息: 心跳消息; 2 .PROPOSAL消息:Leader发起的提案,要求Follower投票; 3 .COMMIT消息:服务器端最新一次提案的信息; 4 .UPTODATE消息:表明同步完成; 5 .REVALIDATE消息:根据Leader的REVALIDATE结果,关闭待revalidate的session还是允许其接受消息; 6 .SYNC消息:返回SYNC结果到客户端,这个消息最初由客户端发起,用来强制得到最新的更新。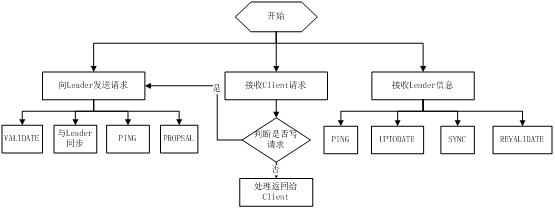
observer流程和Follower的唯一不同的地方就是observer不会参加leader发起的投票。
-
Redis的两种持久化方式
技术背景

很多时候我们需要持久化数据也就是将内存中的数据写入到硬盘里面,大部分原因是为了之后重用数据(比如重启机器、机器故障之后回复数据),或者是为了防止系统故障而将数据备份到一个远程位置。
快照(snapshotting)持久化(RDB)
Redis可以通过创建快照来获得存储在内存里面的数据在某个时间点上的副本。Redis创建快照之后,可以对快照进行备份,可以将快照复制到其他服务器从而创建具有相同数据的服务器副本(Redis主从结构,主要用来提高Redis性能),还可以将快照留在原地以便重启服务器的时候使用。
快照持久化是Redis默认采用的持久化方式,在redis.conf配置文件中默认有此下配置:
save 900 1 #在900秒(15分钟)之后,如果至少有1个key发生变化,Redis就会自动触发BGSAVE命令创建快照。 save 300 10 #在300秒(5分钟)之后,如果至少有10个key发生变化,Redis就会自动触发BGSAVE命令创建快照。 save 60 10000 #在60秒(1分钟)之后,如果至少有10000个key发生变化,Redis就会自动触发BGSAVE命令创建快照。AOF(append-only file)持久化
与快照持久化相比,AOF持久化 的实时性更好,因此已成为主流的持久化方案。默认情况下Redis没有开启AOF(append only file)方式的持久化,可以通过appendonly参数开启:
appendonly yes开启AOF持久化后每执行一条会更改Redis中的数据的命令,Redis就会将该命令写入硬盘中的AOF文件。AOF文件的保存位置和RDB文件的位置相同,都是通过dir参数设置的,默认的文件名是appendonly.aof。
在Redis的配置文件中存在三种不同的 AOF 持久化方式,它们分别是:
appendfsync always #每次有数据修改发生时都会写入AOF文件,这样会严重降低Redis的速度 appendfsync everysec #每秒钟同步一次,显示地将多个写命令同步到硬盘 appendfsync no #让操作系统决定何时进行同步为了兼顾数据和写入性能,用户可以考虑 appendfsync everysec选项 ,让Redis每秒同步一次AOF文件,Redis性能几乎没受到任何影响。而且这样即使出现系统崩溃,用户最多只会丢失一秒之内产生的数据。当硬盘忙于执行写入操作的时候,Redis还会优雅的放慢自己的速度以便适应硬盘的最大写入速度。
Redis 4.0 对于持久化机制的优化
Redis 4.0 开始支持 RDB 和 AOF 的混合持久化(默认关闭,可以通过配置项 aof-use-rdb-preamble 开启)。 如果把混合持久化打开,AOF 重写的时候就直接把 RDB 的内容写到 AOF 文件开头。这样做的好处是可以结合 RDB 和 AOF 的优点, 快速加载同时避免丢失过多的数据。当然缺点也是有的, AOF 里面的 RDB 部分是压缩格式不再是 AOF 格式,可读性较差。
AOF 重写
AOF重写可以产生一个新的AOF文件,这个新的AOF文件和原有的AOF文件所保存的数据库状态一样,但体积更小。 AOF重写是一个有歧义的名字,该功能是通过读取数据库中的键值对来实现的,程序无须对现有AOF文件进行任伺读入、分析或者写入操作。 在执行 BGREWRITEAOF 命令时,Redis 服务器会维护一个 AOF 重写缓冲区,该缓冲区会在子进程创建新AOF文件期间,记录服务器执行的所有写命令。当子进程完成创建新AOF文件的工作之后,服务器会将重写缓冲区中的所有内容追加到新AOF文件的末尾,使得新旧两个AOF文件所保存的数据库状态一致。最后,服务器用新的AOF文件替换旧的AOF文件,以此来完成AOF文件重写操作。
参考
-
Linux IO模式及 select、poll、epoll详解
一、概念说明
- 用户空间和内核空间
- 进程切换
- 进程的阻塞
- 文件描述符
- 缓存 I/O
用户空间和内核空间
现在操作系统都是采用虚拟存储器,那么对32位操作系统而言,它的寻址空间(虚拟存储空间)为4G(2的32次方)。操作系统的核心是内核,独立于普通的应用程序,可以访问受保护的内存空间,也有访问底层硬件设备的所有权限。为了保证用户进程不能直接操作内核(kernel),保证内核的安全,操心系统将虚拟空间划分为两部分,一部分为内核空间,一部分为用户空间。针对linux操作系统而言,将最高的1G字节(从虚拟地址0xC0000000到0xFFFFFFFF),供内核使用,称为内核空间,而将较低的3G字节(从虚拟地址0x00000000到0xBFFFFFFF),供各个进程使用,称为用户空间。
进程切换
为了控制进程的执行,内核必须有能力挂起正在CPU上运行的进程,并恢复以前挂起的某个进程的执行。这种行为被称为进程切换。因此可以说,任何进程都是在操作系统内核的支持下运行的,是与内核紧密相关的。
从一个进程的运行转到另一个进程上运行,这个过程中经过下面这些变化:
1. 保存处理机上下文,包括程序计数器和其他寄存器。 2. 更新PCB信息。 3. 把进程的PCB移入相应的队列,如就绪、在某事件阻塞等队列。 4. 选择另一个进程执行,并更新其PCB。 5. 更新内存管理的数据结构。 6. 恢复处理机上下文。进程的阻塞
正在执行的进程,由于期待的某些事件未发生,如请求系统资源失败、等待某种操作的完成、新数据尚未到达或无新工作做等,则由系统自动执行阻塞原语(Block),使自己由运行状态变为阻塞状态。可见,进程的阻塞是进程自身的一种主动行为,也因此只有处于运行态的进程(获得CPU),才可能将其转为阻塞状态。当进程进入阻塞状态,是不占用CPU资源的。
文件描述符fd
文件描述符(File descriptor)是计算机科学中的一个术语,是一个用于表述指向文件的引用的抽象化概念。
文件描述符在形式上是一个非负整数。实际上,它是一个索引值,指向内核为每一个进程所维护的该进程打开文件的记录表。当程序打开一个现有文件或者创建一个新文件时,内核向进程返回一个文件描述符。在程序设计中,一些涉及底层的程序编写往往会围绕着文件描述符展开。但是文件描述符这一概念往往只适用于UNIX、Linux这样的操作系统。
缓存 I/O
缓存 I/O 又被称作标准 I/O,大多数文件系统的默认 I/O 操作都是缓存 I/O。在 Linux 的缓存 I/O 机制中,操作系统会将 I/O 的数据缓存在文件系统的页缓存( page cache )中,也就是说,数据会先被拷贝到操作系统内核的缓冲区中,然后才会从操作系统内核的缓冲区拷贝到应用程序的地址空间。
缓存 I/O 的缺点:数据在传输过程中需要在应用程序地址空间和内核进行多次数据拷贝操作,这些数据拷贝操作所带来的 CPU 以及内存开销是非常大的。
##、 二 IO模式
刚才说了,对于一次IO访问(以read举例),数据会先被拷贝到操作系统内核的缓冲区中,然后才会从操作系统内核的缓冲区拷贝到应用程序的地址空间。所以说,当一个read操作发生时,它会经历两个阶段:
1. 等待数据准备 (Waiting for the data to be ready) 2. 将数据从内核拷贝到进程中 (Copying the data from the kernel to the process)正式因为这两个阶段,linux系统产生了下面五种网络模式的方案。
- 阻塞 I/O(blocking IO) - 非阻塞 I/O(nonblocking IO) - I/O 多路复用( IO multiplexing) - 信号驱动 I/O( signal driven IO) - 异步 I/O(asynchronous IO)阻塞 I/O(blocking IO)

当用户进程调用了recvfrom这个系统调用,kernel就开始了IO的第一个阶段:准备数据(对于网络IO来说,很多时候数据在一开始还没有到达。比如,还没有收到一个完整的UDP包。这个时候kernel就要等待足够的数据到来)。这个过程需要等待,也就是说数据被拷贝到操作系统内核的缓冲区中是需要一个过程的。而在用户进程这边,整个进程会被阻塞(当然,是进程自己选择的阻塞)。当kernel一直等到数据准备好了,它就会将数据从kernel中拷贝到用户内存,然后kernel返回结果,用户进程才解除block的状态,重新运行起来。
所以,blocking IO的特点就是在IO执行的两个阶段都被block了。非阻塞 I/O(nonblocking IO)
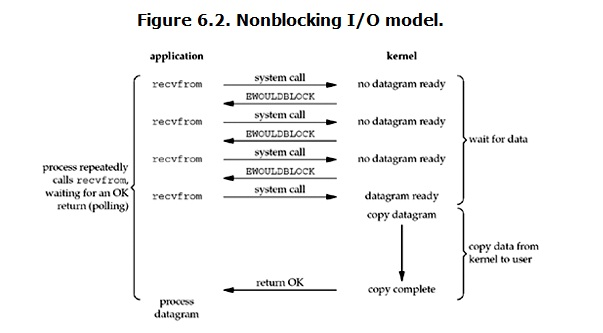
当用户进程发出read操作时,如果kernel中的数据还没有准备好,那么它并不会block用户进程,而是立刻返回一个error。从用户进程角度讲 ,它发起一个read操作后,并不需要等待,而是马上就得到了一个结果。用户进程判断结果是一个error时,它就知道数据还没有准备好,于是它可以再次发送read操作。一旦kernel中的数据准备好了,并且又再次收到了用户进程的system call,那么它马上就将数据拷贝到了用户内存,然后返回。
nonblocking IO的特点是用户进程需要不断的主动询问kernel数据好了没有。I/O 多路复用( IO multiplexing)
IO multiplexing就是我们说的select,poll,epoll,有些地方也称这种IO方式为event driven IO。select/epoll的好处就在于单个process就可以同时处理多个网络连接的IO。它的基本原理就是select,poll,epoll这个function会不断的轮询所负责的所有socket,当某个socket有数据到达了,就通知用户进程。
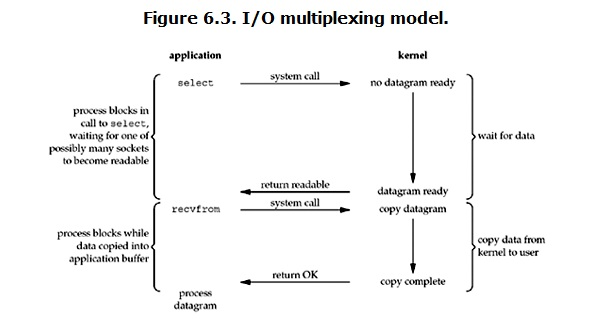
当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
I/O 多路复用的特点是通过一种机制一个进程能同时等待多个文件描述符,而这些文件描述符(套接字描述符)其中的任意一个进入读就绪状态,select()函数就可以返回。这个图和blocking IO的图其实并没有太大的不同,事实上,还更差一些。因为这里需要使用两个system call (select 和 recvfrom),而blocking IO只调用了一个system call (recvfrom)。但是,用select的优势在于它可以同时处理多个connection。
所以,如果处理的连接数不是很高的话,使用select/epoll的web server不一定比使用multi-threading + blocking IO的web server性能更好,可能延迟还更大。select/epoll的优势并不是对于单个连接能处理得更快,而是在于能处理更多的连接。)
在IO multiplexing Model中,实际中,对于每一个socket,一般都设置成为non-blocking,但是,如上图所示,整个用户的process其实是一直被block的。只不过process是被select这个函数block,而不是被socket IO给block。
异步 I/O(asynchronous IO)
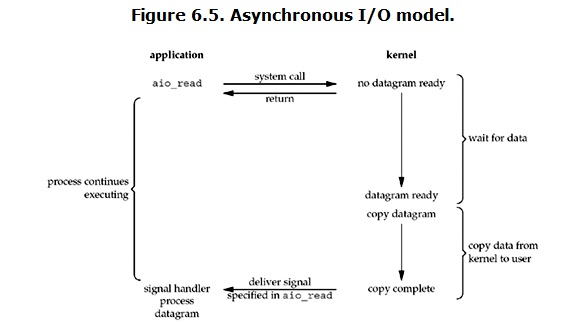
用户进程发起read操作之后,立刻就可以开始去做其它的事。而另一方面,从kernel的角度,当它受到一个asynchronous read之后,首先它会立刻返回,所以不会对用户进程产生任何block。然后,kernel会等待数据准备完成,然后将数据拷贝到用户内存,当这一切都完成之后,kernel会给用户进程发送一个signal,告诉它read操作完成了。
总结
blocking和non-blocking的区别
调用blocking IO会一直block住对应的进程直到操作完成,而non-blocking IO在kernel还准备数据的情况下会立刻返回。
synchronous IO和asynchronous IO的区别
在说明synchronous IO和asynchronous IO的区别之前,需要先给出两者的定义。POSIX的定义是这样子的:
- A synchronous I/O operation causes the requesting process to be blocked until that I/O operation completes; - An asynchronous I/O operation does not cause the requesting process to be blocked;两者的区别就在于synchronous IO做”IO operation”的时候会将process阻塞。按照这个定义,之前所述的blocking IO,non-blocking IO,IO multiplexing都属于synchronous IO。
有人会说,non-blocking IO并没有被block啊。这里有个非常“狡猾”的地方,定义中所指的”IO operation”是指真实的IO操作,就是例子中的recvfrom这个system call。non-blocking IO在执行recvfrom这个system call的时候,如果kernel的数据没有准备好,这时候不会block进程。但是,当kernel中数据准备好的时候,recvfrom会将数据从kernel拷贝到用户内存中,这个时候进程是被block了,在这段时间内,进程是被block的。
而asynchronous IO则不一样,当进程发起IO 操作之后,就直接返回再也不理睬了,直到kernel发送一个信号,告诉进程说IO完成。在这整个过程中,进程完全没有被block。
-各个IO Model的比较如图所示: 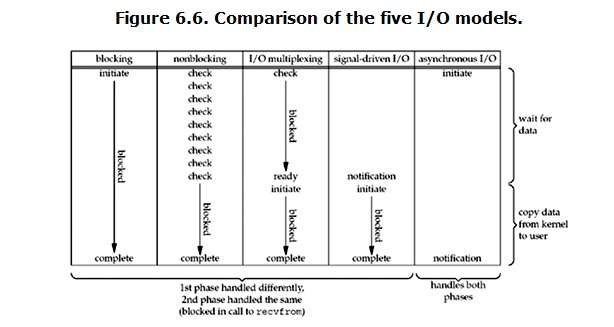通过上面的图片,可以发现non-blocking IO和asynchronous IO的区别还是很明显的。在non-blocking IO中,虽然进程大部分时间都不会被block,但是它仍然要求进程去主动的check,并且当数据准备完成以后,也需要进程主动的再次调用recvfrom来将数据拷贝到用户内存。而asynchronous IO则完全不同。它就像是用户进程将整个IO操作交给了他人(kernel)完成,然后他人做完后发信号通知。在此期间,用户进程不需要去检查IO操作的状态,也不需要主动的去拷贝数据。
三、I/O 多路复用之select、poll、epoll详解
select,poll,epoll都是IO多路复用的机制。I/O多路复用就是通过一种机制,一个进程可以监视多个描述符,一旦某个描述符就绪(一般是读就绪或者写就绪),能够通知程序进行相应的读写操作。但select,poll,epoll本质上都是同步I/O,因为他们都需要在读写事件就绪后自己负责进行读写,也就是说这个读写过程是阻塞的,而异步I/O则无需自己负责进行读写,异步I/O的实现会负责把数据从内核拷贝到用户空间。
select
int select (int n, fd_set *readfds, fd_set *writefds, fd_set *exceptfds, struct timeval *timeout);select 函数监视的文件描述符分3类,分别是writefds、readfds、和exceptfds。调用后select函数会阻塞,直到有描述副就绪(有数据 可读、可写、或者有except),或者超时(timeout指定等待时间,如果立即返回设为null即可),函数返回。当select函数返回后,可以 通过遍历fdset,来找到就绪的描述符。 select目前几乎在所有的平台上支持,其良好跨平台支持也是它的一个优点。select的一 个缺点在于单个进程能够监视的文件描述符的数量存在最大限制,在Linux上一般为1024,可以通过修改宏定义甚至重新编译内核的方式提升这一限制,但 是这样也会造成效率的降低。
poll
int poll (struct pollfd *fds, unsigned int nfds, int timeout);不同与select使用三个位图来表示三个fdset的方式,poll使用一个 pollfd的指针实现。
struct pollfd { int fd; /* file descriptor */ short events; /* requested events to watch */ short revents; /* returned events witnessed */ };pollfd结构包含了要监视的event和发生的event,不再使用select“参数-值”传递的方式。同时,pollfd并没有最大数量限制(但是数量过大后性能也是会下降)。 和select函数一样,poll返回后,需要轮询pollfd来获取就绪的描述符。 select和poll都需要在返回后,通过遍历文件描述符来获取已经就绪的socket。事实上,同时连接的大量客户端在一时刻可能只有很少的处于就绪状态,因此随着监视的描述符数量的增长,其效率也会线性下降。
epoll
epoll是在2.6内核中提出的,是之前的select和poll的增强版本。相对于select和poll来说,epoll更加灵活,没有描述符限制。epoll使用一个文件描述符管理多个描述符,将用户关系的文件描述符的事件存放到内核的一个事件表中,这样在用户空间和内核空间的copy只需一次。
一、epoll操作过程 epoll操作过程需要三个接口,分别如下: int epoll_create(int size);//创建一个epoll的句柄,size用来告诉内核这个监听的数目一共有多大 int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event); int epoll_wait(int epfd, struct epoll_event * events, int maxevents, int timeout); 1. int epoll_create(int size); 创建一个epoll的句柄,size用来告诉内核这个监听的数目一共有多大,这个参数不同于select()中的第一个参数,给出最大监听的fd+1的值,参数size并不是限制了epoll所能监听的描述符最大个数,只是对内核初始分配内部数据结构的一个建议。 当创建好epoll句柄后,它就会占用一个fd值,在linux下如果查看/proc/进程id/fd/,是能够看到这个fd的,所以在使用完epoll后,必须调用close()关闭,否则可能导致fd被耗尽。 2. int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event); 函数是对指定描述符fd执行op操作。 - epfd:是epoll_create()的返回值。 - op:表示op操作,用三个宏来表示:添加EPOLL_CTL_ADD,删除EPOLL_CTL_DEL,修改EPOLL_CTL_MOD。分别添加、删除和修改对fd的监听事件。 - fd:是需要监听的fd(文件描述符) - epoll_event:是告诉内核需要监听什么事,struct epoll_event结构如下:struct epoll_event { __uint32_t events; /* Epoll events / epoll_data_t data; / User data variable */ };
//events可以是以下几个宏的集合:
EPOLLIN :表示对应的文件描述符可以读(包括对端SOCKET正常关闭); EPOLLOUT:表示对应的文件描述符可以写; EPOLLPRI:表示对应的文件描述符有紧急的数据可读(这里应该表示有带外数据到来); EPOLLERR:表示对应的文件描述符发生错误; EPOLLHUP:表示对应的文件描述符被挂断; EPOLLET: 将EPOLL设为边缘触发(Edge Triggered)模式,这是相对于水平触发(Level Triggered)来说的。 EPOLLONESHOT:只监听一次事件,当监听完这次事件之后,如果还需要继续监听这个socket的话,需要再次把这个socket加入到EPOLL队列里3. int epoll_wait(int epfd, struct epoll_event * events, int maxevents, int timeout); 等待epfd上的io事件,最多返回maxevents个事件。 参数events用来从内核得到事件的集合,maxevents告之内核这个events有多大,这个maxevents的值不能大于创建epoll_create()时的size,参数timeout是超时时间(毫秒,0会立即返回,-1将不确定,也有说法说是永久阻塞)。该函数返回需要处理的事件数目,如返回0表示已超时。二 工作模式
epoll对文件描述符的操作有两种模式:LT(level trigger)和ET(edge trigger)。LT模式是默认模式,LT模式与ET模式的区别如下: LT模式:当epoll_wait检测到描述符事件发生并将此事件通知应用程序,应用程序可以不立即处理该事件。下次调用epoll_wait时,会再次响应应用程序并通知此事件。 ET模式:当epoll_wait检测到描述符事件发生并将此事件通知应用程序,应用程序必须立即处理该事件。如果不处理,下次调用epoll_wait时,不会再次响应应用程序并通知此事件。
1. LT模式 LT(level triggered)是缺省的工作方式,并且同时支持block和no-block socket.在这种做法中,内核告诉你一个文件描述符是否就绪了,然后你可以对这个就绪的fd进行IO操作。如果你不作任何操作,内核还是会继续通知你的。 2. ET模式 ET(edge-triggered)是高速工作方式,只支持no-block socket。在这种模式下,当描述符从未就绪变为就绪时,内核通过epoll告诉你。然后它会假设你知道文件描述符已经就绪,并且不会再为那个文件描述符发送更多的就绪通知,直到你做了某些操作导致那个文件描述符不再为就绪状态了(比如,你在发送,接收或者接收请求,或者发送接收的数据少于一定量时导致了一个EWOULDBLOCK 错误)。但是请注意,如果一直不对这个fd作IO操作(从而导致它再次变成未就绪),内核不会发送更多的通知(only once)ET模式在很大程度上减少了epoll事件被重复触发的次数,因此效率要比LT模式高。epoll工作在ET模式的时候,必须使用非阻塞套接口,以避免由于一个文件句柄的阻塞读/阻塞写操作把处理多个文件描述符的任务饿死。
四 epoll总结
在 select/poll中,进程只有在调用一定的方法后,内核才对所有监视的文件描述符进行扫描,而epoll事先通过epoll_ctl()来注册一 个文件描述符,一旦基于某个文件描述符就绪时,内核会采用类似callback的回调机制,迅速激活这个文件描述符,当进程调用epoll_wait() 时便得到通知。(此处去掉了遍历文件描述符,而是通过监听回调的的机制。这正是epoll的魅力所在。)
epoll的优点主要是一下几个方面: 1. 监视的描述符数量不受限制,它所支持的FD上限是最大可以打开文件的数目,这个数字一般远大于2048,举个例子,在1GB内存的机器上大约是10万左 右,具体数目可以cat /proc/sys/fs/file-max察看,一般来说这个数目和系统内存关系很大。select的最大缺点就是进程打开的fd是有数量限制的。这对 于连接数量比较大的服务器来说根本不能满足。虽然也可以选择多进程的解决方案( Apache就是这样实现的),不过虽然linux上面创建进程的代价比较小,但仍旧是不可忽视的,加上进程间数据同步远比不上线程间同步的高效,所以也不是一种完美的方案。 IO的效率不会随着监视fd的数量的增长而下降。epoll不同于select和poll轮询的方式,而是通过每个fd定义的回调函数来实现的。只有就绪的fd才会执行回调函数。 如果没有大量的idle -connection或者dead-connection,epoll的效率并不会比select/poll高很多,但是当遇到大量的idle- connection,就会发现epoll的效率大大高于select/poll。